Semi-Autonomous Drone Delivery System with Real-Time Cloud Integration
A semi-autonomous drone delivery system integrating Mission Planner with cloud-based infrastructure, enabling real-time monitoring, automated delivery workflows, and scalable logistics operations.
Designed with a focus on real-time telemetry integration, cloud-based control architecture, and research-driven innovation validated through IEEE international publication.
Research & Publication
This project has been formally published in an international IEEE conference, demonstrating both academic contribution and practical implementation in drone-based logistics systems.
Enhancing Mission Planner with Real-Time Cloud Integration for Semi-Autonomous Drone-Based Logistics
Visual Overview
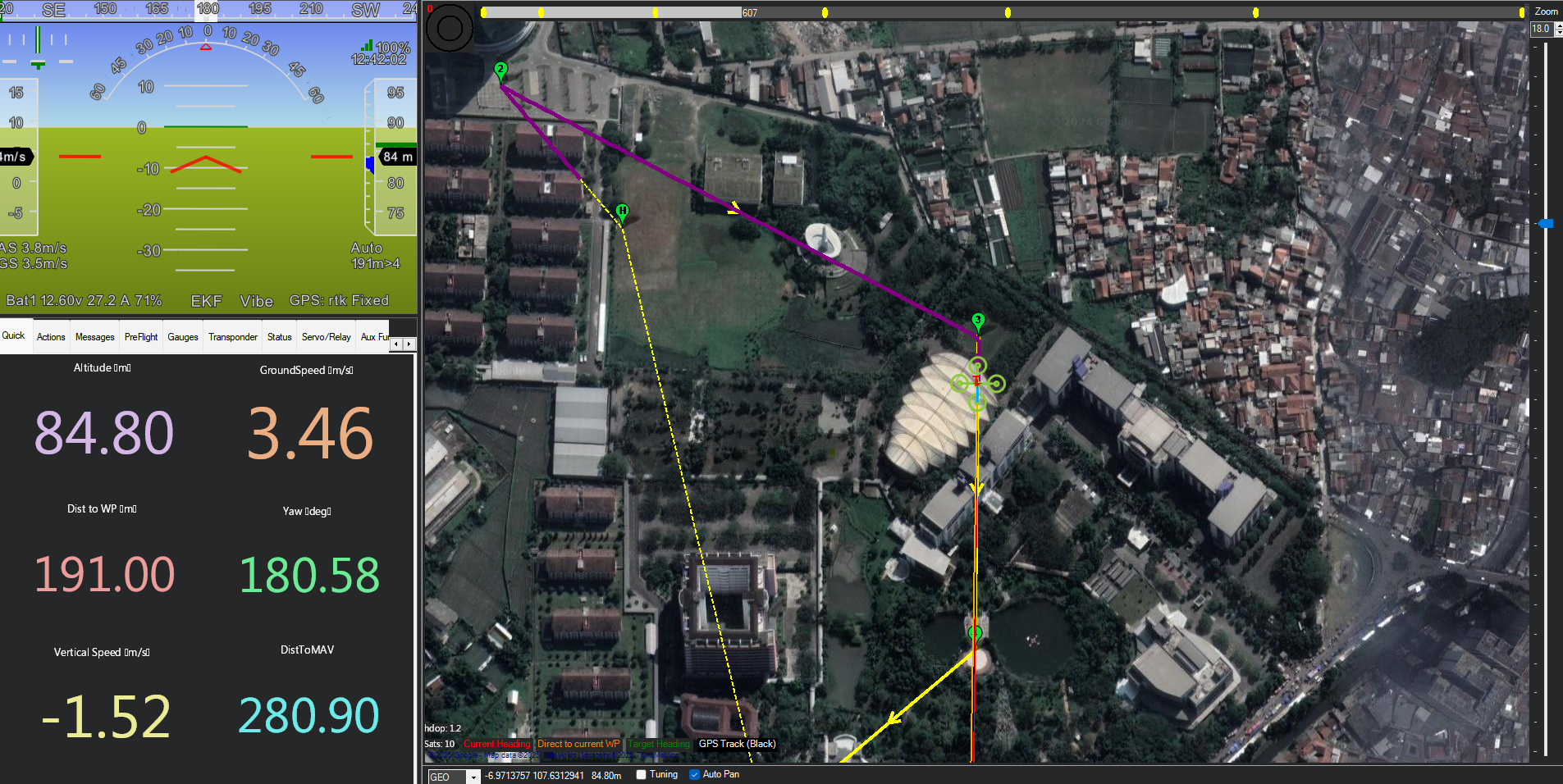
A comprehensive view of the system interface and drone operations, including real-time tracking, order management, and delivery monitoring.




01The Problem
Traditional drone delivery systems are often constrained by manual operations and lack of integration with cloud-based platforms. This limitation reduces scalability, delays decision-making, and restricts real-time operational visibility.
- Lack of real-time integration between drone telemetry and centralized system
- High dependency on manual drone operation
- No unified system for monitoring and managing deliveries
- Limited automation in delivery workflows
- Absence of reliable delivery verification mechanism
02The Approach
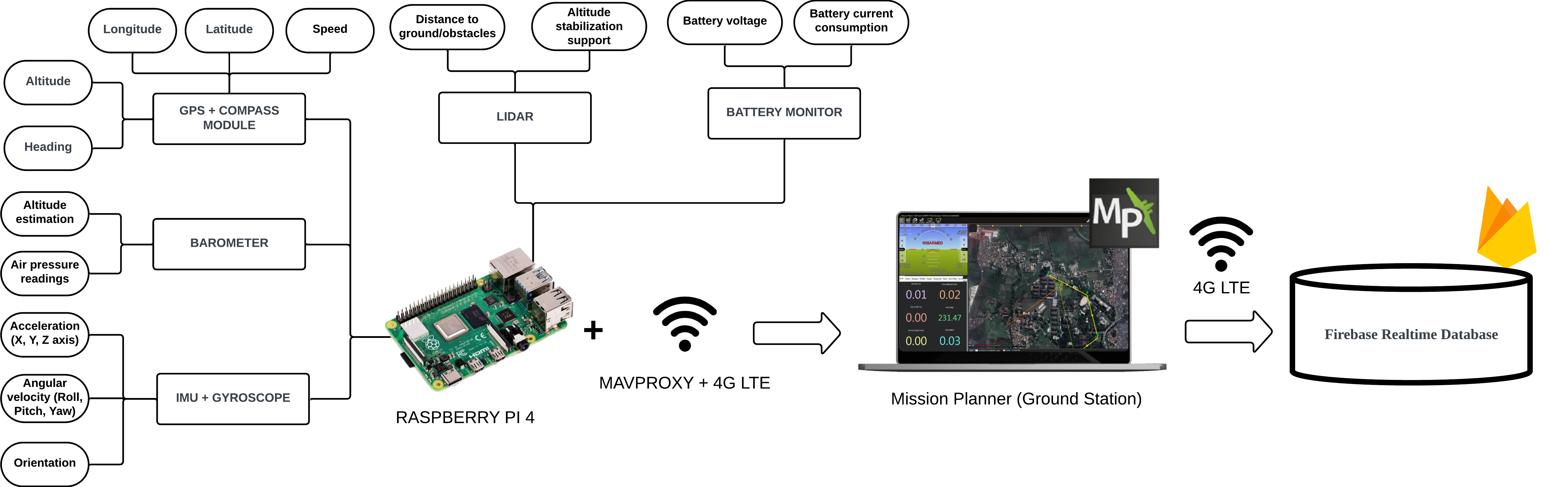
The system was developed using a hybrid architecture that bridges Mission Planner with a real-time cloud database, enabling bidirectional communication between drone and dashboard systems.
- Real-time telemetry streaming using Firebase
- Event-driven command execution from cloud to drone
- Dual-script architecture (Mission Planner + Python cloud bridge)
- Lightweight integration without modifying Mission Planner core
- Geofencing logic for automated delivery validation
03The Impact
The system provides a practical implementation of semi-autonomous drone logistics, validated through both system testing and academic publication.
- Real-time monitoring and control of drone delivery
- Automated delivery workflow with minimal human intervention
- Increased efficiency in logistics operations
- Research contribution published in IEEE international conference
- Demonstrated scalability for future smart logistics systems
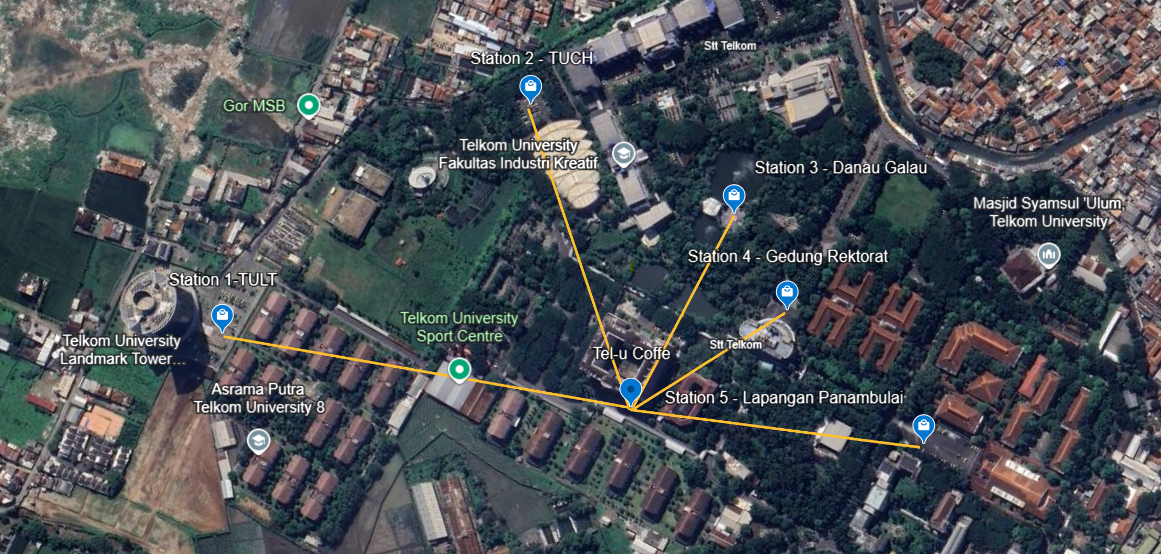
Workflow System
Integrated workflow between drone system, cloud database, and management dashboard.
Key Features
Real-Time Telemetry Integration
Continuously streams drone telemetry data to cloud database for live monitoring
Semi-Autonomous Delivery System
Drone executes delivery workflows automatically based on system-triggered commands
Geofencing-Based Validation
Ensures accurate delivery completion detection using spatial and altitude thresholds
Cloud-Based Command Control
Enables remote command execution from dashboard to drone in real-time
Centralized Monitoring Dashboard
Provides full operational visibility and control within a single interface
Technologies Used
Project Context
This project was developed as part of an academic research initiative focusing on real-time cloud integration in drone-based logistics systems. The research contributes to the advancement of semi-autonomous drone operations by combining traditional ground control systems with modern cloud-based architectures.
The outcome demonstrates a scalable and practical approach to integrating Mission Planner with real-time databases, bridging the gap between conventional drone control and intelligent logistics systems.
Ready to build something amazing?
Let's discuss how we can translate your vision into a high-performance digital product that delivers results.